
Международная организация стандартизации определила стандарт ISO 11519-2 для шин САМ со скоростью обмена до 125 Кбит/сек и ISO 11898 для скорости обмена выше 125 Кбит/сек. Эти стандарты различаются только спецификациями нижних подуровней MD1 и РМА физического уровня протокола CAN в вопросах подключения к передающей среде (шине).
Подуровни MD1 и РМА иногда называют блоком MAU — medium access unit (блоком доступа к среде передачи данных). На рис. 7.2 показано подключение к шине CAN в соответствии с этими стандартами.
Скоростной канал связи образован двухпроводной линией (рис. 7.2, а), к обоим концам которой подключены характеристические сопротивления для подавления отражений. Это дифференциальная линия с подавлением синфазных помех. За счет низкого характеристического сопротивления линия имеет хорошую помехоустойчивость, особенно если использована витая пара.
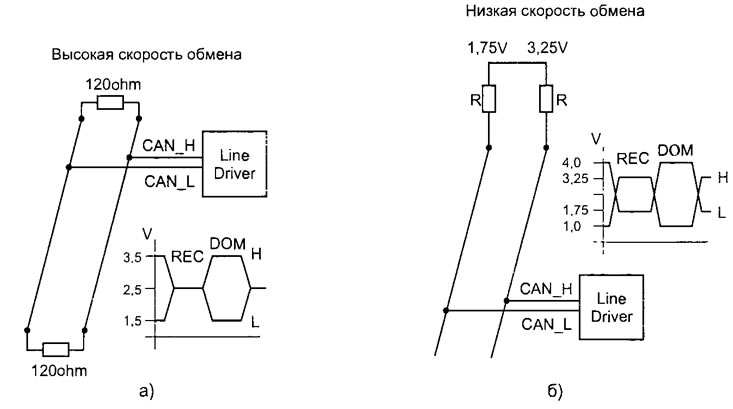
Рис. 7.2. Подключение к шине CAN
Медленный канал связи также выполнен двухпроводным (рис. 7.2, б). Концы линии через сопротивления R=2,2 кОм подключены к источникам напряжения различной величины. Преимущество такой линии заключается в некоторой информационной избыточности, т. к. данные, по сути, дублируются и передаются независимо по двум проводам. В случае повреждения одного провода сетевые адаптеры могут быть реконфигурированы для работы в однопроводной линии, помехозащищенность при этом ухудшится. За счет паразитной связи между проводами линия более чувствительна к искажениям и не может быть использована для высокоскоростного режима.
Подуровень РМА (подключение к физической среде) определяет характеристики шинных драйверов и приемников.
При этом линии шины CAN могут находиться в одном из двух состояний: доминирующего уровня (dominant) и недоминирующего уровня (recessive). Если один из узлов устанавливает шину в состояние доминирующего уровня, оно будет установлено, независимо от состояний остальных узлов. Эти состояния определяются дифференциальным напряжением между проводниками шины, называемыми CAN_H и CAN_L (рис. 7.3). Величина дифференциального напряжения для состояния доминирующего уровня составляет 1,5...3 В, для состояния недоминирующего уровня 0,5...+0,05 В.
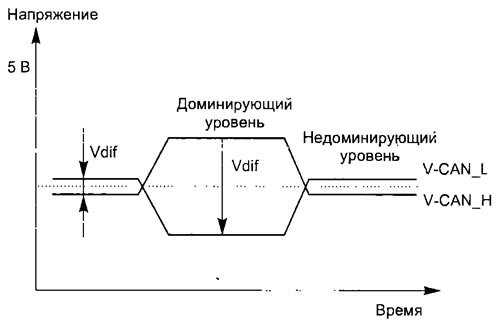
Рис. 7.3. Уровни напряжений в шине CAN
Характеристики шинных драйверов задаются стандартом ISO 11898, где указаны все электрические спецификации. Например, максимальное число подключаемых к шине узлов не должно превышать 30.
На рис. 7.4 схематично показано подключение линейного драйвера к скоростной шине.
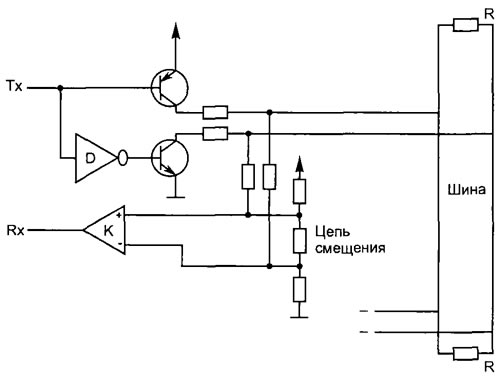
Рис. 7.4. Подключение драйвера к шине
Когда логический уровень сигнала на входе Тх равен «1», оба транзистора в выходном каскаде закрыты и выход драйвера находится в высокоимпедансном состоянии. Шина находится в состоянии недоминирующего уровня, дифференциальное напряжение примерно равно нулю, напряжение смещения около 2,5 В.
При подаче сигнала «0» на вход Тх оба транзистора отпираются, дифференциальное напряжение становится равным около 2,5 В, шина переходит в состояние доминирующего уровня.
Наличие цепи смещающего напряжения гарантирует смену полярностей сигналов на входах компаратора «К» при переходе шины от одного состояния к другому.